








Consultation sur les produits
Votre adresse email ne sera pas publiée. Les champs obligatoires sont marqués *



Guide des moteurs à courant continu à balais : comment cela fonctionne, spécifications clés et quand en utiliser un
Jun 04,2026
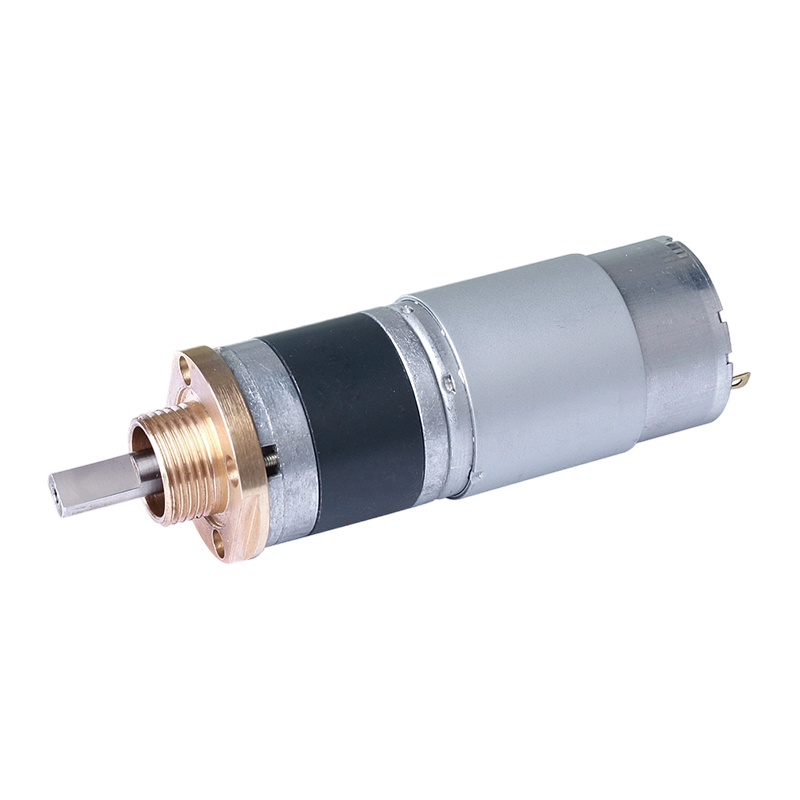
Moteurs à engrenages CC : le guide complet de l'acheteur sur les types, les spécifications et la sélection
May 28,2026
Motoréducteur pas à pas expliqué : types, couple et comment choisir le bon
May 21,2026Un motoréducteur à courant continu est un moteur électrique à courant continu associé à un réducteur mécanique dans une seule unité intégrée. Le moteur lui-même tourne rapidement (souvent entre 3 000 et 15 000 tr/min à la tension nominale), mais la plupart des applications réelles nécessitent un mouvement lent et contrôlé avec une force de rotation importante. La boîte de vitesses résout ce problème en échangeant la vitesse contre du couple grâce à une série d’engrenages engrenés. Le résultat est un arbre de sortie qui tourne beaucoup plus lentement que le rotor du moteur, mais avec un couple proportionnellement plus élevé disponible au niveau de l'arbre.
Sans la boîte de vitesses, un petit moteur à courant continu peut facilement faire tourner une pale de ventilateur, mais a du mal à soulever une charge, à entraîner un tapis roulant ou à faire tourner une vanne. Avec une réduction de vitesse de, disons, 100:1, le même moteur qui produit 5 mN·m de couple libre délivre désormais environ 500 mN·m en sortie, moins les pertes dues au frottement de l'engrenage, généralement de 5 à 20 % selon le type d'engrenage et la lubrification. Cette multiplication du couple, combinée à l'intégration compacte du moteur et du réducteur dans un seul ensemble, explique pourquoi les motoréducteurs à courant continu comptent parmi les composants de mouvement les plus largement spécifiés dans les applications industrielles, commerciales et grand public.
La conception de la boîte de vitesses a un impact plus important sur les performances, la taille, l’efficacité et le bruit que presque toute autre variable de conception. Quatre configurations dominent le marché.
Les engrenages droits ont des dents droites coupées parallèlement à l’axe de l’arbre. Il s'agit du type d'engrenage le plus simple et le moins coûteux à fabriquer, ce qui fait des moteurs à courant continu à engrenages droits le choix par défaut pour les applications sensibles aux coûts. Leur principal point faible est le bruit : étant donné que toute la largeur des dents s'engage simultanément à chaque contact de maille, les engrenages droits produisent un cliquetis caractéristique à grande vitesse. L'efficacité est bonne – généralement 95 à 98 % par étage – et ils supportent bien les charges radiales modérées. Les moteurs à engrenages droits sont courants dans les imprimantes, les jouets, les distributeurs automatiques et les actionneurs légers où un fonctionnement silencieux n'est pas une priorité.
Un réducteur planétaire dispose plusieurs engrenages « planétaires » autour d'un engrenage « solaire » central, tous contenus dans une couronne dentée. Étant donné que la charge est partagée simultanément sur plusieurs engrenages planétaires, un moteur à engrenages planétaires à courant continu fournit une densité de couple très élevée dans un boîtier coaxial compact. L'arbre de sortie est aligné avec l'arbre du moteur, ce qui simplifie l'installation dans des configurations limitées en espace. Les réducteurs planétaires sont plus rigides et plus précis que les types à éperon ou à vis sans fin, ce qui en fait le choix préféré pour la robotique, les véhicules à guidage automatique (AGV), les tournevis électriques et toute application exigeant un couple élevé, une précision de positionnement serrée et une longue durée de vie. Le compromis est le coût : les réducteurs planétaires sont nettement plus coûteux à produire que les types droits ou hélicoïdaux pour le même couple nominal.
Une boîte de vitesses à vis sans fin utilise un arbre à vis sans fin en forme de vis qui engrène avec une roue à vis sans fin à un angle de 90 degrés. Cette configuration permet d'obtenir des rapports de réduction très élevés en un seul étage — généralement de 5 :1 à 100 :1 — et offre une caractéristique d'autoverrouillage naturelle : lorsque le moteur s'arrête, la charge ne peut pas faire reculer la boîte de vitesses. Cela rend les moteurs CC à engrenages à vis sans fin idéaux pour les applications dans lesquelles la charge doit maintenir sa position sans alimentation, telles que les ouvre-portes de garage, les ascenseurs de scène, les actionneurs de lits d'hôpitaux et les barrières de sécurité. La principale limitation est l'efficacité : le frottement des mailles des engrenages à vis sans fin est élevé, avec un rendement typique à un étage allant de 50 à 90 % en fonction de l'angle d'attaque, des rapports plus élevés étant progressivement moins efficaces. Les moteurs à engrenages à vis sans fin produisent également une chaleur importante dans des cycles de service continus à charge élevée.
Les engrenages hélicoïdaux ont des dents taillées à un angle par rapport à l'axe de l'arbre, de sorte que le contact entre les dents est graduel et progressif plutôt que brusque. Cela réduit considérablement le bruit et les vibrations par rapport aux engrenages droits et améliore légèrement la capacité de charge grâce à la plus grande surface de contact effective. Les moteurs à engrenages hélicoïdaux à courant continu sont courants dans les applications qui nécessitent un fonctionnement plus silencieux : entraînements de convoyeurs, machines d'emballage et équipements médicaux. Les combinaisons hélicoïdales-coniques permettent à l'arbre de sortie d'être décalé à 90 degrés par rapport au moteur, similaire à un entraînement à vis sans fin mais avec un rendement plus élevé (généralement 94 à 97 % par étage). La poussée axiale accrue générée par l'engrènement hélicoïdal nécessite des roulements capables de supporter cette charge, ce qui augmente légèrement le coût unitaire.
L'élément moteur à courant continu lui-même se décline en deux architectures fondamentales, et le choix entre elles affecte de manière significative le coût, les exigences de maintenance, la plage de vitesse et la durée de vie.
| Caractéristique | Moteur à engrenages CC brossé | Moteur à engrenages CC sans balais (BLDC) |
| Méthode de commutation | Mécanique (collecteur de balais de charbon) | Électronique (ESC ou pilote de moteur) |
| Durée de vie typique | 500 à 3 000 heures (usure des brosses limitée) | 10 000 à 20 000 heures |
| Complexité du contrôle | Simple – tension ou PWM direct | Nécessite un pilote/ESC BLDC dédié |
| Efficacité | 75 à 85 % typique | 85 à 95 % typique |
| Bruit et EMI | Plus élevé (l'arc des brosses génère des EMI) | Inférieur |
| Coût unitaire | Inférieur | Supérieur (pilote de moteur) |
| Demandes typiques | Jouets, électroménagers, automatisation de l'éclairage | Robotique, AGV, dispositifs médicaux, véhicules électriques |
Pour le prototypage ou les applications intermittentes à faible consommation, un moteur à engrenages CC à balais entraîné par un simple pont en H L298N ou TB6612FNG constitue la voie la plus rapide et la moins chère vers un système fonctionnel. Pour tout ce qui fonctionne en continu, fonctionne dans un environnement difficile ou doit durer des années sur le terrain sans entretien, un moteur à engrenages CC sans balais — malgré son coût initial plus élevé et son électronique de pilotage supplémentaire — offre presque toujours un meilleur coût total de possession.
Les fiches techniques des motoréducteurs à courant continu peuvent être denses, mais cinq paramètres déterminent si un moteur fonctionnera dans votre application. Comprendre chacun d’eux évite les erreurs de sélection les plus courantes.
Motoréducteurs à courant continu sont conçus pour une tension d'alimentation spécifique – le plus souvent 6 V, 12 V, 24 V ou 48 V dans les applications industrielles et de loisirs. Faire fonctionner un moteur nettement au-dessus de sa tension nominale accélère l'usure des balais des types à balais, surchauffe les enroulements et raccourcit la durée de vie des roulements. Un fonctionnement en dessous de la tension nominale réduit le couple disponible et peut provoquer le calage du moteur sous charge. Pour les systèmes alimentés par batterie, faites correspondre la tension nominale du moteur à la tension nominale de la batterie à mi-charge, et non à pleine charge, pour éviter une surtension en haut du cycle de charge. Un motoréducteur 12 V CC alimenté par un LiPo 3S fraîchement chargé (12,6 V) est à peine acceptable ; l'exécuter à partir d'un pack 4S (16,8 V) le détruira rapidement.
La vitesse à vide correspond au régime de l'arbre de sortie lorsque le moteur fonctionne à la tension nominale avec un couple appliqué nul. Sous charge réelle, la vitesse chute, généralement de 10 à 20 % au couple nominal (continu), et jusqu'à 50 % au couple de décrochage maximal. Lorsque vous calculez si un motoréducteur à courant continu peut déplacer une charge à la vitesse requise, utilisez toujours la vitesse en charge à votre point de fonctionnement de couple prévu, et non le chiffre à vide. Les fabricants ne répertorient parfois que la vitesse à vide et le couple de décrochage ; le point de fonctionnement en charge se situe à peu près au milieu de la courbe vitesse-couple.
Le couple nominal (également appelé couple continu) est le couple maximum que le moteur peut fournir indéfiniment sans surchauffe. Le couple de décrochage est le couple maximal produit lorsque l'arbre est maintenu stationnaire - généralement 5 à 10 fois le couple nominal d'un motoréducteur à courant continu à balais. Le couple de décrochage est utile pour dimensionner les charges de pointe intermittentes (la force nécessaire pour libérer une vanne coincée, par exemple), mais un fonctionnement continu au calage ou presque entraînera une surchauffe rapide du moteur. Sélectionnez un moteur dont le couple nominal est d'au moins 20 à 30 % supérieur au couple de charge continu attendu de votre application. Cette marge de sécurité tient compte de la variation de friction, de l'affaissement de tension et du déclassement de température.
Le rapport de transmission exprime le nombre de tours de l'arbre du moteur qui produisent un tour de l'arbre de sortie. Un rapport de 50:1 signifie que la sortie tourne une fois tous les 50 tours du moteur. Des rapports de démultiplication plus élevés produisent une vitesse de sortie inférieure et un couple de sortie plus élevé. Cependant, des rapports très élevés introduisent davantage d'étages d'engrenages, ce qui augmente les pertes par frottement et le jeu (le faible jeu libre dans l'arbre de sortie lorsque la direction s'inverse). Pour les applications de positionnement, le jeu est une spécification essentielle : les réducteurs planétaires offrent généralement 0,5 à 3 minutes d'arc de jeu dans les niveaux de précision, tandis que les réducteurs droits économiques peuvent avoir 1 à 5 degrés de jeu, ce qui est inacceptable pour tout ce qui nécessite un positionnement reproductible.
Le cycle de service décrit le pourcentage de temps pendant lequel un moteur fonctionne par rapport au temps de repos au cours d'une période de cycle donnée. Un moteur classé S1 (service continu) peut fonctionner indéfiniment à la charge nominale sans surchauffe. Les classifications S2 (service de courte durée) et S3 (service périodique intermittent) permettent des niveaux de puissance de pointe plus élevés car le moteur refroidit pendant les périodes d'arrêt. Faites toujours correspondre le taux de service du moteur à votre cycle de fonctionnement réel : un moteur évalué pour un cycle de service de 30 % surchauffera et tombera en panne s'il fonctionne en continu, même si le couple et la vitesse sont dans les limites de la plaque signalétique.
La sélection de la tension dépend souvent de la source d'alimentation disponible plutôt que des préférences du moteur, mais comprendre les cas d'utilisation typiques de chaque niveau de tension permet d'affiner rapidement vos options.
Une bonne sélection de moteur du premier coup évite des refontes coûteuses et des pannes sur le terrain. Suivez ce cadre pratique :
Calculez le couple requis par votre application sur l'arbre de sortie. Pour un robot à roues, cela signifie calculer la force nécessaire pour accélérer la masse du robot, surmonter le frottement de roulement et gravir toutes les pentes attendues en fonctionnement. Pour un actionneur linéaire, calculez la force exercée sur la vis mère et convertissez-la en couple moteur via l'avance et l'efficacité de la vis. Ajoutez une marge de sécurité de 25 à 50 % pour tenir compte des variations de friction, du vieillissement et des pires scénarios de chargement. Ce chiffre de couple cible – avec la marge appliquée – devient votre spécification de couple nominal minimum.
Établissez la vitesse minimale et maximale de l’arbre de sortie dont votre application a besoin. Un convoyeur qui déplace le produit à une vitesse de 0,5 m/s avec un rouleau d'entraînement de 50 mm de diamètre nécessite une vitesse de sortie d'environ 191 tr/min (0,5 / (π × 0,05) × 60). Sélectionnez un moteur dont la vitesse à vide est d'au moins 15 à 20 % supérieure à la vitesse en charge requise pour garantir que le moteur ne fonctionne pas près du décrochage dans des conditions normales.
Utilisez le guide de décision suivant pour adapter le type de boîte de vitesses aux exigences de l'application :
Vérifiez que votre alimentation peut fournir la demande de courant de pointe du moteur au décrochage. Le courant de décrochage pour un motoréducteur à courant continu à balais est généralement 5 à 10 fois supérieur au courant à vide. Si votre alimentation ne peut pas fournir ce courant de manière transitoire pendant le démarrage ou dans des conditions de blocage, ajoutez un pilote de moteur limitant le courant avec une limite de courant réglable, ou sélectionnez un pilote de moteur avec une marge adéquate. Pour les moteurs à engrenages CC sans balais, confirmez que les courants nominaux continus et de crête du pilote BLDC dépassent les exigences du moteur avec une marge d'au moins 20 %.
Les motoréducteurs CC standard ne sont pas scellés. Si le moteur est exposé à la poussière, à l'humidité, aux éclaboussures de liquide de refroidissement ou à des conditions de lavage, spécifiez une unité classée IP : IP54 pour la protection contre la poussière et les éclaboussures, IP65 ou IP67 pour les environnements plus exigeants. Pour les applications agroalimentaires, pharmaceutiques ou marines, vérifiez que le lubrifiant de la boîte de vitesses répond aux exigences réglementaires applicables (graisse alimentaire NSF H1 pour les zones de contact alimentaire par exemple). La plage de température de fonctionnement est également importante : les moteurs standard sont conçus pour une température ambiante de 0 à 40 °C ; pour les entrepôts frigorifiques ou les installations extérieures dans les climats nordiques, confirmer les spécifications de graisse à basse température et les températures nominales des enroulements.
Les motoréducteurs à courant continu apparaissent dans une vaste gamme de produits et de systèmes. Comprendre où ils sont couramment utilisés permet d'identifier les conceptions de référence appropriées et les configurations validées.
| Industrie | Application | Type de moteur à engrenages typique |
| Robotique et AGV | Roues motrices, actionnement des articulations, mécanismes de préhension | Planétaire sans balais, 24 V-48 V |
| Automatisation industrielle | Convoyeurs, tables d'indexation, actionneurs de vannes | Hélicoïdal, à vis sans fin ou planétaire, 24 V |
| Dispositifs médicaux | Pompes à perfusion, outils chirurgicaux, lits d'hôpitaux | Planétaire sans balais, faible jeu, 12 V-24 V |
| Automobile | Vitres électriques, dispositifs de réglage des sièges, commandes de toit ouvrant | Ver ou éperon brossé, 12V |
| Electronique grand public | Panoramique/inclinaison de la caméra, actionneurs de maison intelligente, imprimantes | Éperon brossé, 5 V-12 V |
| Agriculture | Commande de vanne d'irrigation, mécanismes de semis | Vis sans fin ou planétaire certifié IP, 12 V-24 V |
| Automatisation des bâtiments | Registres CVC, actionneurs de stores, entraînements de portes | Hélicoïdal ou à vis sans balais, 24 V |
Les moteurs à engrenages CC sont bien adaptés au fonctionnement à vitesse variable car la vitesse du moteur CC est directement proportionnelle à la tension appliquée. En pratique, la vitesse est contrôlée par l'une des trois méthodes suivantes.
PWM est la méthode standard pour contrôler les moteurs à engrenages CC à balais à partir de microcontrôleurs, d'automates et de circuits intégrés de commande de moteur. Le pilote allume et éteint l'alimentation du moteur à une fréquence fixe (généralement entre 1 et 20 kHz) et le cycle de service (le pourcentage de temps pendant lequel l'alimentation est allumée) détermine la tension moyenne et donc la vitesse. Un cycle de service de 50 % à 12 V fournit environ 6 V équivalents au moteur. Le contrôle PWM est efficace car les transistors de commutation passent la plupart de leur temps complètement activés ou complètement désactivés, minimisant ainsi les pertes résistives. Les fréquences PWM inférieures à 1 kHz peuvent provoquer un gémissement audible du moteur lorsque les enroulements d'induit vibrent à la fréquence de commutation ; les fréquences supérieures à 20 kHz le poussent au-dessus de la plage audible. Pour les moteurs à engrenages CC à balais, une fréquence PWM de 10 à 20 kHz est un choix pratique courant.
Pour les applications nécessitant une vitesse précise et constante quelle que soit la variation de charge (plates-formes robotiques, lecteurs de bande, distribution de précision), un encodeur rotatif monté sur l'arbre du moteur ou sur la sortie de la boîte de vitesses fournit un retour de vitesse en temps réel à un contrôleur PID. Le contrôleur compare la vitesse réelle au point de consigne et ajuste le cycle de service PWM pour compenser. Les codeurs pour moteurs à engrenages CC sont généralement du type à effet Hall optique ou magnétique en quadrature, avec des résolutions de 6 à plusieurs milliers de coups par tour en fonction des exigences de précision. De nombreux fournisseurs de motoréducteurs à courant continu proposent des options d'encodeur intégré en tant qu'articles standard du catalogue, simplifiant considérablement l'intégration matérielle.
Dans les systèmes simples où la charge est relativement constante et où la précision de la vitesse n'est pas critique, la vitesse peut être réglée en ajustant la tension d'alimentation avec une alimentation CC variable ou un régulateur de tension linéaire. Cette approche est la moins efficace (un régulateur linéaire dissipe la chute de tension sous forme de chaleur) et n'offre aucune compensation de charge, mais il s'agit de la mise en œuvre la plus simple et convient aux bancs d'essai, aux réglages manuels de la vitesse et aux applications à très faible consommation où la dissipation thermique dans le régulateur n'est pas un problème.
Comprendre ce qui finit par provoquer la panne d'un motoréducteur à courant continu vous aide à concevoir des systèmes qui prolongent les intervalles d'entretien et détectent les problèmes avant qu'ils n'entraînent des temps d'arrêt imprévus.
Votre adresse email ne sera pas publiée. Les champs obligatoires sont marqués *
Droit d'auteur © Zhejiang Dongzheng Motor Co., Ltd. Tous droits réservés.
 Fabricants de moteurs à engrenages CC
Fabricants de moteurs à engrenages CC